06-08.07.2022

4th Conference on Aerospace RObotics, CARO⁴
This conference is devoted to presenting and discussing ongoing international activities related to aerospace robotics.
Robots, operating in a remote and hostile environment such as Earth’s orbit or surface of another planet, bring many interesting scientific and technical challenges. The conference will create an opportunity to discuss main issues related to robotics, unmanned aerial vehicles, control systems, mechatronics, etc. It will also provide a chance to exchange information with researchers involved in orbital mechanics, planetology and material sciences. Poland is a member of the European Space Agency (ESA) and many Polish space activities are synchronized with broader European programs. This may create new possibilities for international cooperation and development.
In 2022 the conference's format will be slightly changed in comparison with previous editions. Space Robot Dynamics Laboratory that forms a branch of CBK PAN in Zielona Góra has started a cooperation with Institute of Microelectronics in Frankfurt/Oder (Germany) in the framework of transboundary Interreg project named "SpaceRegion: Cross-border integration of the space sector". An important part of this project is dedicated to the development of space robot/manipulator controllers and their implementation in hardware (FPGAs, SoCs). The results of this activity as well as of several project case studies dedicated to AI methods in autonomous navigation will be presented at the Workshop on Space Microelectronics (WoSM) taking place in the last day of the conference.
Due to COVID-19 Pandemic, the CARO⁴ conference in 2022 will be adapted to safety regulations. The conference will be held in a "hybrid" mode with possible in person and online presentations.
This edition of the CARO⁴ conference will be held in Zielona Góra, the local government capital of the Lubuskie Voivodeship (western part of Poland). 2022 is a celebration year for Zielona Góra due to 800th anniversary of city founding and 700th anniversary of granting municipal rights. Related events will be taking place whole year long, starting with "Grape-Harvest" in September 2022 until September 2023. The townspeople chose the anniversary slogan: "Zielona Góra lecie obchodzi – wino się chłodzi" ("Zielona Góra celebrates the anniversary - the wine is cooling").
Meeting Topics (but not limited to):
* Space robotics,
* Space manipulators,
* Control systems,
* Satellite formation flying,
* Flying robots and quadrotors,
* UAVs,
* Mobile and autonomous robots,
* Robotic space exploration,
* Sensor fusion,
* Signal processing,
* Space electronics,
* Communication systems,
* Artificial Intelligence,
* ISRU on Moon and asteroids,
* Social aspects of space robotics.
Selected papers will be published after the CARO⁴ conference in journals: e.g.,
PAR - Measurement Automation Robotics (Pomiary Automatyka Robotyka), ISSN: 1427-9126;
Artificial Satellites, ISSN: 2083-6104, or in
GeoPlanet: Earth and Planetary Sciences series.
International Program Committee
Committee for CARO⁴ conference
Marek Banaszkiewicz, Space Research Centre (CBK PAN), Poland
Tomasz Barciński, Space Research Centre (CBK PAN), Poland
Ignacy Dulęba, Wrocław University of Technology, Poland
Andrzej Dzieliński, Warsaw University of Technology, Poland
Janusz Frączek, Warsaw University of Technology, Poland
Mirosław Galicki, University of Zielona Gora/Space Research Centre (CBK PAN), Poland
Elżbieta Jarzębowska, Warsaw University of Technology, Poland
Krzysztof Kopczyński, Military University of Technology, Poland
Miloš Krstić, University of Potsdam, Germany
Peter Langendörfer, Innovations for High Performance Microelectronics, Germany
Alicja Mazur, Wrocław University of Technology, Poland
Justyna Patalas-Maliszewska, University of Zielona Gora, Poland
Leszek Podsękowski, Lodz University of Technology, Poland
Jurek Sąsiadek, Carleton University, Canada - Chair
Karol Seweryn, Space Research Centre (CBK PAN), Poland
Tadeusz Uhl, AGH University of Science and Technology, Poland
Cezary Zieliński, Warsaw University of Technology, Poland
Committee for Workshop on Space Microelectronics
Marek Banaszkiewicz, Space Research Centre (CBK PAN), Poland - Chair
Piotr Dziurzański, West Pomeranian University of Technology in Szczecin, Poland
Mirosław Galicki, University of Zielona Gora/Space Research Centre (CBK PAN), Poland
Gerhard Kahmen, Brandenburg University of Technology, Cottbus-Senftenberg, Germany
Miloš Krstić, University of Potsdam, Germany
Peter Langendörfer, Innovations for High Performance Microelectronics, Germany
Andreas Mai, Technical University of Applied Sciences, Wildau, Germany
Krzysztof Piotrowski, Innovations for High Performance Microelectronics, Germany
Marek Węgrzyn, Space Research Centre (CBK PAN), Poland
Organizing Committee
Damian Nagajek, Anna Pszonka, Michał Rąpała, Marek Węgrzyn (Chair )
e-mail: caro@spaceregion.eu
Invited speakers
")
")
")
")
")
")
")
")
")
Conference Program
-
06.07.2022, Wednesday
-
Welcome
Jurek Sąsiadek and Marek Banaszkiewicz -
Session I – Orbital Robotics
Chair: Karol Seweryn -
Invited presentation: Jurek Sąsiadek (Carlton University, Canada),
Space robotics - a survey -
Rizwan Tariq Syed, Markus Ulbricht, Krzysztof Piotrowski and Milos Krstic,
A Survey on Fault-Tolerant Methodologies for Deep Neural Networks -
Tomasz Rybus, Konrad Aleksiejuk, Fatina Liliana Basmadji and Adam Sikorski,
Application of the Obstacle Vector Field (OVF) method for trajectory planning of a planar 3 DoF manipulator in simulated microgravity conditions -
Marek Banaszkiewicz, Marek Węgrzyn, Fatina Liliana Basmadji and Mirosław Galicki,
Robust trajectory tracking control of space manipulators in extended task space -
Coffee break
-
Session II – Control Systems I
Chair: Jurek Sąsiadek -
Invited presentation: Roy Lichtenheldt (DLR, Germany),
The DLR Scout Rover - an agile, robust robot for extraterrestrial cave explorationThe DLR Scout Rover is a small (18kg) rover using rimless wheels for locomotion. The wheels and other parts are compliant. As a result the rover is able to travers difficult terrain not suitable for normal wheeled systems and is far more robust than common legged systems. Its mission scenario is to enter lunar or martian lava tube through skylights. In order to keep the system as simple as possible Scout will jump/drop into these pit entrances in a one way fashion. On its way through the cave it will lay out relays, perform scientific measurement and surveys the cave passages. Decisions will be made by a novel navigation algorithm that allows the choice of the best passage without being to prohibitive. The development goal is to reach TRL 7/8 by 2030.
-
Marcin Kłak and Elżbieta Jarzębowska,
Dynamics Contact Model of a Free-Floating Space Manipulator Grasping a Rotating Target -
Filip Dyba, Tomasz Rybus, Mateusz Wojtunik and Fatina Liliana Basmadji,
Active 6 DoF force/torque control based on Dynamic Jacobian for free-floating space manipulator -
Grzegorz Pajak and Iwona Pajak,
Sub-optimal Motions of Mobile Manipulators with Control Constraints -
Lunch break
-
Session III – In situ Resource Utilization
Chair: Piotr Kulinowski -
Invited presentation: Jakub Ciążela (ING PAN, Poland),
Ore prospecting on the Moon and Mars: geological conditions and technical capabilitiesCold War between the United States and the Soviet Union fuelled a beautiful and successful race to the Moon in the 1960s. Half a century later, we are at the onset of a new space race to the Moon and Mars with many more contenders. One of the major challenges for their future colonization is access to local resources including metals. Although space colonization is still a long run, scientists already have tools to determine what resources and where we can expect on the Moon and Mars.
-
Karol Seweryn et al,
Proposal of Open pit mine on Moon -
Petr Konečný, Jacek Katzer, Janusz Kobaka and Karol Seweryn,
Estimation of the Regolith Mining Pit Size for the Covering Lunar Habitat by Protective Layer -
Przemyslaw Mlynarczyk, Adam Kolusz and Alberto Gallina,
Sensitivity analysis of the DEM model numerical parameters on the value of the angle of repose of the lunar regolith analog -
Janusz Kobaka, Jacek Katzer and Karol Seweryn,
Magnetic Separation of Lunar Regolith as its Beneficiation for Construction Effort on the Moon -
Arkadiusz Tkacz and Karol Seweryn,
The impact of lunar environment on energy efficiency of selected mining activities -
Welcome meeting (with a walking tour of Zielona Góra city center)
-
07.07.2022, Thursday
-
Session IV – Sensors and Actuators
Chair: Elżbieta Jarzębowska -
Invited presentation: Mathieu Rognant (Onera, France),
PULSAR: Testing the Technologies for On Orbit Assembly of a Large TelescopeThe EU project PULSAR (Prototype of an Ultra Large Structure Assembly Robot) carried out a feasibility analysis for a potential mission that could demonstrate robotic technology for autonomous assembly of a large space telescope. The project performed the analysis using two hardware demonstrators, one devoted to show the assembly of five segmented mirror tiles using a robotic manipulator, and another one showing extended mobility for assembling a large structure in low gravity conditions. The hardware demonstrators were complemented with a simulation analysis to demonstrate the operation of a fully integrated system and to address the challenges especially in the field of attitude and orbital control. The techniques developed in the project support the path toward In-Space Servicing, Assembly and Manufacturing (ISAM).
-
Ignacy Duleba and Iwona Karcz-Duleba,
Many Faces of Singularities in Robotics -
Hamdan Alatresh Bitlmal, Malik Al-Isawi and Jurek Sasiadek,
Design and Development Optical Angle Sensor -
Patryk Bartkowiak, Radosław Patelski, Marta Kwiatkowska and Dariusz Pazderski,
System Architecture for Development and Supervision of Robotic Astronomical Telescope -
Ignacy Kraciuk, Dymitr Osiński, PIAP Space,
A Survey of Functions for a Multipurpose Gripper for On-Orbit Satellite Servicing -
Coffee break
-
Session V – Control Systems II
Chair: Ignacy Dulęba -
Invited presentation: Piotr Kulinowski (AGH University of Science and Technology, Poland),
TOLRECON - Tandem of Lunar Regolith ConveyorsSpaceTeam AGH was invited to participate in Over the Dusty Moon Challenge (2-3.06.2022 Golden, Colorado, USA). The team achieved 2nd place. The presentation is an account of this Challenge.
-
Mateusz Wojtunik, Piotr Łuczak, Tomasz Rybus and Grzegorz Granosik,
Application of the KUKA KUBE test-bed for the hardware-in-the-loop validation of the space manipulator control system -
Hamdan Alatresh Bitlmal, Malik Al-Isawi and Jurek Sasiadek,
Optimal State Estimation via Adaptive Fuzzy Particle Filter -
Piotr Palma, Tomasz Rybus and Karol Seweryn,
Application of Impedance Control of the Free Floating Space Manipulator for Removal of Space Debris -
Malik Al-Isawi, Jurek Sasiadek and Ammar Shuker,
Advanced Quadrotor Fractional Order Controller Based on Particle Swarm Optimization -
Lunch break
-
Panel Session - Space robotics in space activities
Moderator: Marek Banaszkiewicz
Panelists: Zbigniew Burdzy (POLSA), Jarosław Flakowski (Lubuskie Voivodship Marshal Office), Maria Mrówczyńska (University of Zielona Góra), Karol Seweryn (CBN PAN), Urszula Szulewicz (Hertz Systems) -
Gala Dinner (at Palmiarnia)
-
08.07.2022, Friday
-
WoSM: Session VI – Space electronics
Chair: Krzysztof Piotrowski -
Invited presentation: Miloš Krstić (University of Potsdam, Germany),
Designing radiation hard circuits - multi-level approachSpace applications bring many additional requirements to the design of the digital ICs. Reliability of these circuits is strongly affected by radiation effects, leading to soft or even permanent errors. Moreover, increased temperature range and long duration of some missions cause additional needs for dependability analysis. In this talk the flow for designing digital systems for space application will be presented. The methodology for hardening on different design abstraction levels will be presented. Increasing of fault tolerance of standard cells will be presented and verified in measurements. Moreover, the methodology for selective hardening at the RTL level will be discussed. Finally, the resilient and adaptive operation of multi-processor architectures will be presented.
-
Kamil Wołoszyn, Krzysztof Turchan, Michał Rąpała and Krzysztof Piotrowski,
AI4U: Modular Framework for AI Application Design -
Dariusz Janiszewski, Alessandro Veronesi, Rizwan Tariq Syed, Marek Węgrzyn, Krzysztof Piotrowski and Marek Banaszkiewicz,
HLS approach for robust control algorithm implementation in FPGA -
Roman Wawrzaszek, Kamil Jasiński, Tomasz Rudnicki, Kamil Ber, Karol Mostowy, Tomasz Kowalski and Piotr Orleański,
System of GLOWS instrument designed for UV photons registration on board of NASA's IMAP mission to L1 -
Damian Nagajek, Marek Węgrzyn, Mirosław Galicki and Marek Banaszkiewicz,
Design of control system for mobile robot -
Coffee break
-
WoSM: Session VII – Communication systems
Chair: Miloš Krstić -
Invited presentation: Wojciech Debski (Silicon Radar, Germany),
Radars - sensors of the futureWireless technologies become crucial for our daily habits. They may be used for communication and also for sensing purposes. The newest solutions combine these two aspects enabling development of more efficient applications providing broader spectrum of functions. This talk will discuss the great potential behind radar technologies for current and future application areas.
-
Janusz Jabłoński, Marek Węgrzyn and Paweł Wolański,
Safe authentication for space applications -
Roman Wawrzaszek, Nils Thernstrom, Artur Kobyłkiewicz, Ambroise Bidaux-Sokołowski and Karol Gliwa,
Comparison of GNSS filters and combiners in a context of design of multiband GNSS space receivers -
Michał Rąpała, Marek Banaszkiewicz, Mirosław Galicki, Marek Węgrzyn, Damian Nagajek, Kamil Wołoszyn, Krzysztof Turchan and Krzysztof Piotrowski,
Make your robot see. A survey on visual navigation technology -
Marek Węgrzyn, Fatina Liliana Basmadji, Michał Rąpała, Mirosław Galicki and Marek Banaszkiewicz,
Distributed system for testing of space robot control systems -
Lunch break and adjourn
-
Special Session: SpaceRegion Project
IHP and CBK PAN - Summary of Interreg Project
Important dates
Paper submission deadline: 31 March 2022 (extended to 30 April 2022)
Notification of acceptance: 29 May 2022 (extended to 10 June 2022)
Camera-ready paper: 19 June 2022 (extended to 24 June 2022)
The Conference: 06-08 July 2022
Paper submission
The paper submission system was provided by EasyChair for CARO⁴.
Instructions for Authors
All papers submitted to the CARO⁴ conference must comply with the IFAC paper layout. Paper length - 8 pages.
Here you can download template for Microsoft Word or Latex.
See a sample paper for better understanding.
Registration and fee
Registration for CARO⁴ is closed. However, online registration form was avaliable.
Due to COVID-19 Pandemic, the CARO⁴ conference in 2022 will be adapted to safety regulations. The conference will be held in a "hybrid" mode with possible in person and online presentations. The registration fee is covered by organizers and includes: conference admission, conference materials and coffee breaks.
Transport, accommodation and lunches are not covered. Suggestions for accommodations nearby conference venue offering preferential pricing are:
Qubus Hotel, (the list will be updated).
Patronage
Organizers

CBK PAN Branch Zielona Góra, Space Robot Dynamics Laboratory (SRDL)
Space Research Center of the Polish Academy of Sciences
(Centrum Badań Kosmicznych Polskiej Akademii Nauk, CBK PAN)
Space Robot Dynamics Laboratory
ul. Nowy Kisielin – A.Syrkiewicza 6, 66-002 Zielona Góra, Poland
e-mail: caro@spaceregion.eu, www: spaceregion.eu
GPS coordinates: 51.9298614,15.6102369
Venue
Due to COVID-19 Pandemic, the CARO⁴ conference in 2022 will be adapted to safety regulations. The conference will be held in a "hybrid" mode with possible in person and online presentations. The registration for CARO⁴ conference is covered by organizers.
Hotel Qubus (Source)

City Hall (Source)

Palmhouse (Source)
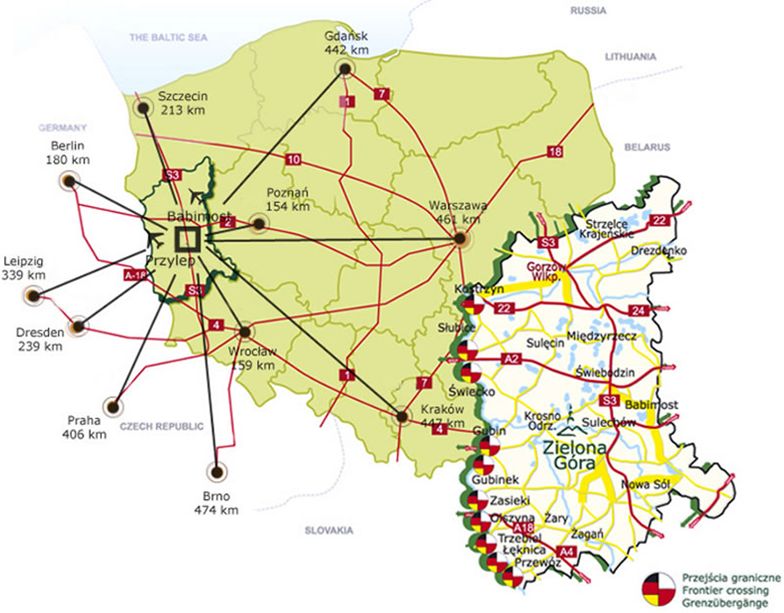
How to reach Zielona Gora
Qubus Hotel
ul. Ceglana 14A, 65-211 Zielona Góra, Poland